Résolution de problèmes de sac à dos par
méta-programmation
Date de publication : 02/02/2010
Par
Julien Jorge (Page personnelle)
Le problème du sac à dos est un problème d'optimisation
combinatoire NP-difficile, ce qui signifie que nous ne
connaissons pas d'algorithme polynomial permettant de le résoudre.
Cependant, il existe en pratique des algorithmes donnant de très bons
résultats.
Nous nous intéressons dans cet article au comportement d'un
compilateur face à la résolution d'un tel problème. Pour cela,
nous implémentons deux algorithmes en n'utilisant que des
techniques de méta-programmation. En pratique, cela signifie
que nous allons écrire les données du problème dans le code,
puis que nous laisserons au compilateur le soin de sa
résolution.
La première partie de cet article introduit le problème.
Elle est suivie par la deuxième section dans laquelle un algorithme naïf
ainsi qu'une technique de programmation dynamique sont décrits
et implémentés de manière classique.
La troisième section présente des techniques de méta-programmation
et montre ensuite les patrons de classe permettant la
résolution lors de la compilation en utilisant l'un des deux
algorithmes. Enfin, la dernière partie concerne la
comparaison des performances obtenues avec chacune des ces
approches.
1. Le problème du sac à dos
1.1. Exemple de problème
2.
Algorithmes pour la résolution de problèmes de sac à dos
2.1. Programmation dynamique par listes
3. Implémentation par méta-programmation
3.1.
Structures classiques de méta-programmation
3.1.1. Liste de types
3.1.1.1.
Exemple d'algorithme : calcul de la longueur
d'une liste de types
3.1.2. Déclaration conditionnelle de type
3.1.2.1.
Exemple d'algorithme : filtrer une liste d'états
3.2. Implémentation de l'algorithme récursif pour le sac à dos
3.3.
Implémentation de la programmation dynamique par
listes
3.3.1. Conversion de la procédure add_item()
3.3.1.1.
Extension de la liste des états en ajoutant
un objet
3.3.1.2. Fusion de deux listes d'états
3.3.1.3. Suppression des états inefficaces
3.3.1.4.
Implémentation du patron remplaçant add_item()
3.3.2. Conversion de la la procédure dp_kp()
4. Expérimentations numériques
5. Conclusion
6. Références
1. Le problème du sac à dos
Le
problème du sac à dos
est un problème d'optimisation combinatoire dans lequel
l'utilisateur dispose d'un ensemble d'objets auxquels
sont associés un profit et un poids. L'objectif est de
sélectionner un sous-ensemble de ces objets tel que la
somme des profits soit maximale et qu'ils tiennent tous
ensemble dans un conteneur d'une capacité donnée.
Dans la suite de cet article, les notations p[i], w[i]
et W représenteront respectivement le profit apporté par
l'objet numéroté i, son poids, et la capacité maximum du
sac.
Ce problème est NP-difficile, ce qui signifie que nous
ne connaissons pas d'algorithme polynomial permettant de le
résoudre. Même si certains algorithmes résolvent des
instances en des temps raisonnables, il existe des
données pour lesquelles la résolution prendrait une
éternité. En effet, dans le pire des cas, la résolution
d'un tel problème avec
n
objets demanderait un nombre d'opérations de l'ordre de
2n
.
L'exemple ci-dessous illustre la difficulté de trouver
une solution optimale pour un tel problème, même pour un
petit nombre d'objets.
1.1. Exemple de problème
Le décideur possède une bibliothèque musicale
contenant dix titres. Le logiciel qu'il utilise pour
gérer sa bibliothèque lui permet de donner une note
comprise entre 1 et 5 à chaque titre, 5 étant
la meilleure note. Les informations sur les titres
sont récapitulées dans la table ci dessous :
| Numéro |
Titre |
Note |
Poids (octets) |
| 1 |
Cohiba Playa - Radiodays (ft. Dj Volto)
|
4 |
4 000 000 |
| 2 |
Musetta - Ophelia's song |
4 |
5 200 000 |
| 3 |
Cartel - Real Talk by Brix |
2 |
2 700 000 |
| 4 |
Professor Kliq - Bust This Bust That
|
5 |
6 800 000 |
| 5 |
The Dada Weatherman - Painted Dream
|
5 |
8 000 000 |
| 6 |
Alexander Blu - Emptiness |
3 |
6 200 000 |
| 7 |
UltraCat - Disco High |
3 |
6 300 000 |
| 8 |
Josh Woodward - Effortless |
2 |
5 300 000 |
| 9 |
Tryad - Struttin' |
1 |
5 600 000 |
| 10 |
Silence - Cellule |
1 |
5 900 000 |
Son lecteur multimédia portable a une capacité de
16 000 000 octets. Il souhaite le remplir de manière
à obtenir la meilleure liste de lecture possible à
partir de sa bibliothèque. C'est-à-dire que la somme
des notes des titres choisis doit être maximale.
Une approche naïve consiste à choisir les titres
dans l'ordre décroissant de leurs notes, jusqu'à
remplir le lecteur. La solution ainsi obtenue est
constituée des titres numéros 4 et 5 et a une note
totale de 10 pour un poids de 14 800 000
octets. Une autre approche intuitive est de choisir
les titres dans l'ordre décroissant du rapport de
leur note sur leur poids. La solution obtenue avec
cette méthode est alors constituée des titres
numéros 1, 2 et 3, avec une note à nouveau égale à
10, pour un poids cette fois égal à 11 900 000
octets.
Ces deux procédés donnent des solutions équivalentes
mais différentes. Cependant, aucune d'entre elles
n'est optimale. Pour trouver une telle liste, il
suffit de construire un problème de sac à dos où les
objets sont les titres. Le coût d'un objet est la
note associée au titre et son poids sa taille en
octets. La capacité du sac est égale à la capacité
du lecteur. Notre problème ainsi construit accepte une
unique solution optimale composée des titres numéros
1, 2 et 4, avec une note de 13 pour un poids de
16 000 000 octets exactement.
2.
Algorithmes pour la résolution de problèmes de sac à dos
La programmation dynamique est une approche générale qui
se retrouve comme technique de résolution de problèmes.
Cette technique peut être appliquée dès lors qu'une
solution optimale consiste en une combinaison de
solutions optimales de sous-problèmes, ce qui est le cas
pour le sac à dos. En effet, la valeur optimale d'une
instance de ce problème peut s'obtenir en considérant le
maximum de deux situations sur le dernier objet, ici
noté avec l'indice
i :
-
Soit l'objet participe à la solution, auquel cas il
ne laisse qu'une capacité égale à
W-w[i]
disponible pour les autres objets. La valeur de
cette solution est alors égale à celle obtenue sur
les autres objets avec cette capacité, plus le
profit
p[i].
-
Soit l'objet ne participe pas à la solution, auquel
cas sa valeur est égale à celle obtenue avec les
autres objets et la même capacité.
Ce procédé
s'applique récursivement jusqu'à ne plus avoir d'objet à
traiter. Dans ce dernier cas, la valeur optimale est
égale à zéro. Bellman
[1]
a mis cela en équation ; de nombreux algorithmes se sont
basés dessus par la suite.
Nous représenterons les données associées à un objet
avec la structure ci-dessous :
\brief
struct kp_item
{
kp_item( unsigned int p, unsigned int w )
: profit(p), weight(w)
{ }
unsigned int profit;
unsigned int weight;
};
|
Une implémentation directe de la procédure récursive est
alors la suivante :
\brief
\param
\param
\param
unsigned int solve_kp
( const std::vector<kp_item>& data, unsigned int d, unsigned int n )
{
if (n==0)
return 0;
else
{
const unsigned int i(n-1);
if (data[i].weight > d)
return solve_kp(data, d, n-1);
else
return std::max
( solve_kp(data, d-data[i].weight, n-1) + data[i].profit,
solve_kp(data, d, n-1) );
}
}
|
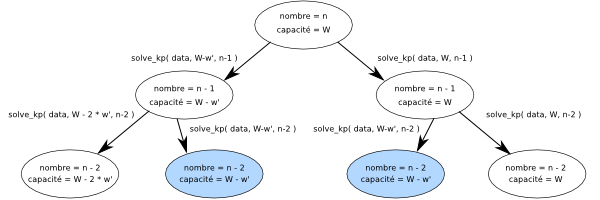
Nous pouvons remarquer que la procédure ci-dessus peut
résoudre des sous-problèmes identiques à plusieurs
reprises. Par exemple, si les deux premiers objets
considérés ont le même poids
w',
alors les appels récursifs
solve_kp(data, d-w[i], n-1)
et
solve_kp(data, d, n-1)
vont tous les deux effectuer un appel à
solve_kp(data, d - w', n-2).
Or, le résultat de cet appel sera identique dans les
deux cas. La figure 1 illustre ces appels récursifs et
met en évidence cette répétition.
Figure 1. Les appels récursifs donnent lieu à de multiples
résolutions d'un même sous-problème. Nous supposons ici
que les deux premiers objets considérés ont le même
poids
w',
les sous-problèmes colorés sont alors identiques.
Bien sûr, il est inefficace de résoudre le même
sous-problème à plusieurs reprises. Par conséquent, nous
aimerions que la valeur optimale pour le sous-problème
avec
n - 2
variables et une capacité égale à
d - w'
ne soit calculée qu'une fois. La programmation dynamique
apporte une réponse à cette difficulté. Il existe de
nombreux algorithmes utilisant cette approche pour le
sac à dos. Cependant, nous ne nous intéresserons qu'à la
programmation dynamique dite
par listes
dans la suite de cet article.
2.1. Programmation dynamique par listes
L'algorithme présenté dans cette section est tiré
d'un ouvrage de Martello et Toth
[2].
Il consiste à maintenir une liste de
sous-problèmes associés à la valeur optimale de
leurs solutions. Cette association représente un
état.
L'algorithme met cette liste à jour en considérant
les objets un à un.
Comme le suggère l'arbre de la figure 1, un
sous-problème est défini par une capacité disponible
et un ensemble d'objets restant à considérer. Nous
associons également à un état la valeur des solutions
optimales du sous-problème. La structure
suivante représente un tel état :
\brief
struct state
{
unsigned int profit;
unsigned int remaining_capacity;
state( unsigned int p, unsigned int r )
: profit(p), remaining_capacity(r)
{ }
};
|
Nous pouvons remarquer que les objets disponibles ne
sont pas représentés dans cette structure. En effet,
à chaque itération de l'algorithme, tous les états en
mémoire auront la même liste d'objets. Il est donc
inutile de stocker cette information.
L'algorithme de calcul des états débute par la
construction d'un état de départ. Initialement, la
capacité disponible est égale à
W,
aucun objet n'est utilisé et le plus grand profit
est donc égal à zéro. Cet état est alors
state(0, W).
Le premier objet est ensuite considéré selon deux
situations. Soit il participe à la solution, donnant
lieu au nouvel état
state(p[0], W - w[0]),
soit il n'y participe pas, auquel cas l'état
state(0, W)
est conservé. Nous avons alors une liste de deux
états pouvant être atteints avec le premier objet.
Le deuxième objet est ensuite considéré à partir de
ces états, donnant lieu à une nouvelle liste
remplaçant l'initiale. Le procédé est répété
pour tous les objets. À la
ie
itération, une liste
L
d'états représentant les sous problèmes obtenus
avec les
i-1
premiers objets est parcourue. L'objet
i
est alors utilisé pour créer les états des
sous-problèmes avec
i
objets. La liste
L
est ensuite remplacée par les nouveaux états
obtenus.
Si plusieurs états ont la même capacité disponible,
seul celui avec le plus grand profit est conservé.
De plus, si la liste contient deux états
s1
et
s2
tels que le profit du second est supérieur au profit
du premier, et tels que la capacité restante dans le
second soit aussi supérieure à celle du premier,
alors seul
s2
est conservé. En effet, il apporte un plus grand
profit tout en laissant plus de place pour les
objets restants. Comme ces objets sont les mêmes dans
les deux cas, il est certain que le premier
n'amènera pas à une solution optimale.
La procédure calculant la liste obtenue en ajoutant
un objet à partir d'une liste initiale d'états est
présentée ci-dessous :
\brief
\param
\param
void add_item( const kp_item& data, std::list<state>& state_list )
{
std::list<state> new_list;
std::list<state>::iterator it;
for (it=state_list.begin(); it!=state_list.end(); ++it)
if (it->remaining_capacity >= data.weight )
new_list.push_back
( state
( it->profit + data.profit, it->remaining_capacity - data.weight ) );
else
break;
std::list<state> old_list;
std::swap(old_list, state_list);
unsigned int best(0);
while ( !old_list.empty() && !new_list.empty() )
{
state new_state(0, 0);
if ( old_list.front().remaining_capacity
== new_list.front().remaining_capacity )
{
new_state =
state
( std::max(old_list.front().profit, new_list.front().profit),
old_list.front().remaining_capacity);
old_list.pop_front();
new_list.pop_front();
}
else if ( old_list.front().remaining_capacity
> new_list.front().remaining_capacity )
{
new_state = old_list.front();
old_list.pop_front();
}
else
{
new_state = new_list.front();
new_list.pop_front();
}
if ( new_state.profit >= best )
{
best = new_state.profit;
state_list.push_back(new_state);
}
}
for ( ; !old_list.empty(); old_list.pop_front() )
if ( old_list.front().profit >= best )
{
best = old_list.front().profit;
state_list.push_back(old_list.front());
}
for ( ; !new_list.empty(); new_list.pop_front() )
if ( new_list.front().profit >= best )
{
best = new_list.front().profit;
state_list.push_back(new_list.front());
}
}
|
Il suffit ensuite d'appeler la fonction
add_item()
sur chaque objet pour mettre à jour la liste des
états et calculer la valeur des solutions optimales.
La procédure de résolution est décrite ci-dessous :
\brief
\param
\param
\return
unsigned int dp_kp
( const std::vector<kp_item>& data, unsigned int W )
{
std::list<state> L;
L.push_back( state(0, W) );
for (std::size_t i=0; i!=data.size(); ++i)
add_item( data[i], L );
return L.back().profit;
}
|
3. Implémentation par méta-programmation
La méta-programmation est une technique qui consiste à
effectuer des manipulations sur les structures décrivant
un programme de manière à générer du code ou à faire
effectuer des calculs par le compilateur, lorsque toutes
les données sont disponibles au moment de la
compilation. C'est une approche qui utilise grandement
les patrons de classe. Le lecteur intéressé pourra
s'orienter vers
cet article
pour de nombreux exemples et par exemple vers la bibliothèque
Loki pour de nombreuses applications.
En pratique, nous allons utiliser les patrons de
classe comme un langage fonctionnel qui agit lors
de la compilation, ce qui implique
certaines contraintes. En effet, nous manipulons des types
et non pas
des instances de classes. Nous ne pourrons donc pas
initialiser nos données via un constructeur, ni
effectuer d'affectation ; nous ne pouvons que définir
de nouveaux types, jamais en remplacer.
Considérons par exemple le type suivant, qui
représentera les données d'un objet du sac à dos dans le
cadre de la méta-programmation :
\brief
\param
\param
template<unsigned int Profit, unsigned int Weight>
struct item
{
static const unsigned int profit = Profit;
static const unsigned int weight = Weight;
};
|
Si nous comparons cette structure à
kp_item,
présentée dans la section 2, nous constatons que les
paramètres du constructeur sont devenus des paramètres
du patron. En réalité, pour le compilateur, ces données
définiront un type basé sur le modèle
item<>.
Nous utiliserons ce type pour stocker nos données. Il
en sera de même pour la structure représentant un état
de la programmation dynamique :
\brief
\param
\param
template<unsigned int Profit, unsigned int RemainingCapacity>
struct state
{
static const unsigned int profit = Profit;
static const unsigned int remaining_capacity = RemainingCapacity;
};
|
Comme pour n'importe quel autre type, nous ne pourrons
lui en « attribuer » un autre. Ainsi, lorsque nous
calculerons les états obtenus depuis un état donné, en
considérant qu'un objet est sélectionné ou non, nous
déclarerons un nouveau type basé sur
state<>
et dont les valeurs des paramètres exprimeront la
sélection éventuelle de l'objet.
En plus de ces limitations, nous n'aurons pas non plus
un accès immédiat aux instructions classiques de
branchement telles que la conditionnelle ou les boucles.
En pratique, nous remplacerons la première par un patron
de classe spécialisé selon la valeur de la condition
(voir la section 3.1.2) et nous utiliserons un procédé
récursif lorsque nous aurons besoin d'effectuer un
traitement itératif.
La section suivante présente deux structures classiques
de la méta-programmation ainsi que des approches
algorithmiques qui y sont associées.
Ces structures seront utilisées dans la
section 3.2, où l'algorithme récursif de résolution de
problèmes de sac à dos sera implémenté, puis dans la
section 3.3, où la programmation dynamique sera à son
tour implémentée.
3.1.
Structures classiques de méta-programmation
Cette section présente deux structures classiques de
méta-programmation que nous utiliserons pour le sac
à dos. Des exemples d'algorithmes utilisant ces
structures sont donnés pour illustrer les calculs
récursifs et la définition conditionnelle de type.
3.1.1. Liste de types
Un exemple classique d'application de la
méta-programmation se trouve dans les listes de
types, définies comme suit :
\brief
\param
\param
template<typename Head, typename Tail>
struct type_list
{
typedef Head head;
typedef Tail tail;
};
|
Cette structure permet de construire une liste
chaînée de types ou de données en utilisant des
énumerations ou des constantes statiques. Le
type
Head
représente le premier élément de la liste tandis
que
Tail
contient les autres éléments. En général, ce
dernier est soit une structure de type
type_list,
soit une structure représentant une liste
vide. Par exemple :
\brief
struct empty_list {};
|
Ce dernier type va nous permettre de mettre fin
à un traitement effectué sur chaque élément de
la liste. Le lecteur intéressé pourra s'orienter
vers
ce billet en anglais.
3.1.1.1.
Exemple d'algorithme : calcul de la longueur
d'une liste de types
La structure ci-dessous permet de calculer
le nombre d'éléments dans une liste de types
nommée
TypeList
passée en paramètre au patron. L'idée est la
suivante : s'il s'agit d'une liste vide,
elle contient zéro éléments. Sinon, elle
contient l'élément
TypeList::head
plus le nombre d'éléments dans
TypeList::tail.
\brief
\param
template<typename TypeList>
struct length;
\brief
template<>
struct length<empty_list>
{
static const unsigned int result = 0;
};
template<typename Head, typename Tail>
struct length< type_list<Head, Tail> >
{
static const unsigned int result =
1 + length<typename Tail>::result;
};
|
Remarquons que nous aurions pu utiliser une
énumération pour stocker la valeur de
result.
En pratique, la différence est faible. Il
faut néanmoins savoir que certains
compilateurs n'acceptent pas cette initialisation
de constante, même statique, dans le corps
de la classe.
Néanmoins, nous aurons besoin par la suite
d'effectuer des comparaisons d'ordre sur des
constantes de ce type. Or, l'utilisation
d'énumération entraîne des avertissements du
compilateur, tandis que des constantes
statiques sont comparables sans ambiguïtés.
Pour cette raison et par souci d'uniformité
toutes nos données seront représentées par
des constantes statiques.
3.1.2. Déclaration conditionnelle de type
Un autre exemple récurrent de méta-programmation
est l'utilisation d'une structure
if_then_else
pour effectuer des définitions conditionnelles
de types. Elle prend en paramètre une valeur
booléenne et deux types. Selon la valeur du
booléen, le résultat est soit le premier type,
soit le second. Cette structure se présente
comme suit :
\brief
\param
\param
\param
template<bool B, typename T1, typename T2>
struct if_then_else;
\brief
template<typename T1, typename T2>
struct if_then_else<true, T1, T2>
{
typedef T1 result;
};
\brief
template<typename T1, typename T2>
struct if_then_else<false, T1, T2>
{
typedef T2 result;
};
|
3.1.2.1.
Exemple d'algorithme : filtrer une liste d'états
Supposons que nous connaissions une liste
d'états de la programmation dynamique et que
nous souhaitions ne conserver que ceux dont
le profit est au dessus d'un certain seuil.
Nous allons déclarer une structure
effectuant cette séparation. Elle prend en
paramètres le seuil et la liste des états,
puis définit un type
result
selon ces paramètres. Si le premier état de
la liste a un profit inférieur à ce seuil,
alors il est ignoré et
le résultat
est celui du traitement sur les états
restants. Sinon,
le résultat
est une liste dont le premier élément est ce
premier état et dont les autres éléments sont le
résultat de ce même traitement sur les états
restants :
\brief
\param
\param
template<unsigned int S, typename StateList>
struct filter;
\brief
template<unsigned int S>
struct filter<S, empty_list>
{
typedef empty_list result;
};
template<unsigned int S, typename Head, typename Tail>
struct filter<S, type_list<Head, Tail> >
{
typedef typename filter<S, Tail>::result new_tail;
typedef typename
if_then_else< (Head::profit < S),
new_tail,
type_list<Head, new_tail> >::result result;
};
|
Sur certains compilateurs, la condition donnée ici
pour le if_then_else ne sera pas
acceptée. Il faudra alors passer par une structure
annexe effectuant la comparaison. Par exemple :
template<unsigned int A, unsigned int B>
struct is_less
{
static const bool result = (A<B);
};
|
3.2. Implémentation de l'algorithme récursif pour le sac à dos
Cette section présente un équivalent à l'algorithme
solve_kp()
de la section 2. Du fait du caractère récursif de
cette procédure, la conversion se fait aisément.
Nous allons définir un patron de classe nommé
solve_kp<>
prenant deux paramètres. Le premier sera un
entier représentant la capacité disponible dans le
sac et le second sera un
type_list
contenant des types
item
auxquels seront indiqués le profit et le poids des
objets. Le premier élément de cette liste sera
considéré et un traitement récursif sera effectué
sur le reste de la liste, éventuellement avec une
autre capacité disponible. Comme pour la structure
length
présentée dans la section 3.1.1.1, effectuer un
appel récursif consiste à faire une nouvelle
instanciation du même patron, avec des paramètres
différents. À nouveau, une spécialisation est faite
pour le cas d'une liste vide, afin de stopper la
récursivité. Le résultat du calcul sera stocké dans
une constante statique nommée
result.
Nous pouvons déjà prédéclarer le patron
solve_kp<>
et effectuer la spécialisation :
\brief
\param
\param
template<unsigned int RemainingCapacity, typename ItemList>
struct solve_kp;
\brief
template<unsigned int RemainingCapacity>
struct solve_kp<RemainingCapacity, empty_list>
{
static const unsigned int result = 0;
};
|
Il ne nous reste plus qu'à effectuer le calcul de la
valeur optimale des solutions. Pour cela, nous
reprenons les trois cas considérés dans la procédure
solve_kp().
Si l'objet traité ne rentre pas dans le sac, le
résultat est un appel récursif avec la même capacité
et avec les objets restants. Sinon, il est égal au
maximum obtenu en considérant que l'objet est
sélectionné ou non. Nous utilisons la structure
suivante pour obtenir le maximum de deux valeurs :
\brief
\param
\param
template<unsigned int A, unsigned int B>
struct max_value
{
static const unsigned int result = (A>B) ? A : B;
};
|
L'écriture du patron de classe
solve_kp<>
est ensuite assez directe. La conditionnelle de la
procédure initiale est remplacée par l'opérateur
ternaire
?:
pouvant être utilisé dans la déclaration de valeurs
constantes :
template<unsigned int RemainingCapacity, typename ItemList>
struct solve_kp
{
typedef typename ItemList::head head;
typedef typename ItemList::tail tail;
static const unsigned int result =
(head::weight > RemainingCapacity) ?
solve_kp<RemainingCapacity, tail>::result :
max_value
<
solve_kp<RemainingCapacity, tail>::result,
solve_kp<RemainingCapacity - head::weight, tail>::result + head::profit
>::result;
};
|
Remarquons que les objets sont considérés ici dans
l'ordre où ils apparaissent dans la liste,
contrairement à la procédure initiale
solve_kp()
où ils étaient traités du dernier au premier. En
pratique, l'ordre des objet n'a aucune influence sur
la valeur optimale des solutions. Cela ne change
donc absolument pas la validité du calcul.
Le code ci-dessous illustre l'utilisation du patron
solve_kp<>
pour calculer la valeur du problème présenté dans la
section 1.1. Pour plus de lisibilité, les poids et
la capacité du sac ont été divisés par 100 000 :
typedef
type_list< item<4, 40>,
type_list< item<4, 52>,
type_list< item<2, 27>,
type_list< item<5, 68>,
type_list< item<5, 80>,
type_list< item<3, 62>,
type_list< item<3, 63>,
type_list< item<2, 53>,
type_list< item<1, 56>,
type_list< item<1, 59>,
empty_list
>
>
>
>
>
>
>
>
>
>
kp;
std::cout << "result=" << solve_kp<160, kp>::result << '\n'
<< std::endl;
|
3.3.
Implémentation de la programmation dynamique par
listes
Le caractère récursif de la procédure
solve_kp()
profite grandement à sa conversion vers le patron de
classe
solve_kp<>.
Malheureusement, l'algorithme de programmation
dynamique ne possède pas ce caractère.
L'implémentation de ce dernier a été faite avec deux
procédures que nous détaillons dans la suite de
cette section. La conversion de la procédure
add_item()
est présentée en premier. Nous détaillons ensuite
l'itération sur la liste des objets effectuée dans
la procédure
dp_kp().
Enfin, la dernière section présente le calcul de
la valeur optimale des solutions en utilisant ces
patrons de classe.
3.3.1. Conversion de la procédure add_item()
La nouvelle liste d'états obtenue par la
considération d'un objet est calculée en trois
étapes. Comme nous l'avons indiqué précédemment,
nous ne pouvons pas effectuer d'affectation.
Chaque opération sur une liste d'états donnera
donc lieu à une nouvelle liste.
Les trois étapes sont les suivantes. Tout
d'abord, une seconde liste est définie à partir
de la première en ajoutant l'objet depuis tous
les états ayant une capacité suffisante. Une
troisième liste est ensuite définie comme étant
la fusion de la seconde avec la première, en ne
gardant que le meilleur profit pour deux états
ayant la même capacité restante. Enfin, une
quatrième liste d'états est définie à partir de
cette dernière, en supprimant les états
clairement inefficaces.
La suite de cette section présente chacune de
ces étapes. Comme pour l'algorithme initial,
nous maintenons la liste des états dans l'ordre
décroissant de la capacité restante tout au long
de la résolution.
3.3.1.1.
Extension de la liste des états en ajoutant
un objet
L'extension de la liste des états prend en
paramètre un objet nommé
Item
et une liste d'états
StateList
initiale. Une nouvelle liste est construite
de la manière suivante : le premier état est
obtenu en ajoutant l'objet depuis le premier
état de la liste. Il s'agit de définir un
nouvel état en utilisant le patron
state<>
pour lequel le profit est la somme de
celui de l'état initial avec celui de
l'objet et la capacité résiduelle est celle
de l'état initial diminuée du poids de
l'objet. Dans le code, ce nouvel état
s'écrit
state<StateList::head::profit +
Item::profit,
StateList::head::remaining_capacity -
Item::weight>.
Le reste de la nouvelle liste est ensuite
obtenu en effectuant le même traitement sur
le reste de la liste initiale.
Bien sûr, si la capacité restante de l'état
considéré est plus petite que le poids de
l'objet, alors cet objet ne peut être
ajouté. De plus, comme la liste initiale est
triée selon la capacité restante
décroissante, il ne pourra pas non plus être
ajouté depuis un état du reste de la liste.
Par conséquent, dans ce cas, la liste
résultante sera une liste vide.
Le traitement complet est détaillé par le
code ci-dessous. Nous vérifions que l'objet
peut être ajouté depuis l'état en tête et
nous définissons la liste résultante selon
ce critère.
\brief
\param
\param
template<typename Item, typename StateList>
struct add_item_to_all;
\brief
template<typename Item>
struct add_item_to_all<Item, empty_list>
{
typedef empty_list result;
};
template<typename Item, typename Head, typename Tail>
struct add_item_to_all< Item, type_list<Head, Tail> >
{
typedef typename
if_then_else
<
is_less_equal<Item::weight, Head::remaining_capacity>::result,
type_list
<
state< Head::profit + Item::profit,
Head::remaining_capacity - Item::weight>,
typename add_item_to_all
<
Item,
Tail
>::result
>,
empty_list
>::result result;
};
|
3.3.1.2. Fusion de deux listes d'états
La deuxième étape de la procédure d'ajout
d'un objet consiste à fusionner la liste
initiale des états avec celle obtenue via la
structure
add_item_to_all.
Cette fusion se fait d'une manière
similaire à celle décrite dans la section
2.1. Nous considérons deux listes d'états,
ordonnés selon leur capacité restante
décroissante. Ces deux listes sont
parcourues en parallèle pour créer une
troisième liste où seul le meilleur état est
conservé pour une capacité restante donnée.
Cette structure est définie ci-dessous :
\brief
\param
\param
template<typename StateList1, typename StateList2>
struct merge_state_lists;
template<typename Head1, typename Tail1, typename Head2, typename Tail2>
struct merge_state_lists< type_list<Head1, Tail1>, type_list<Head2, Tail2> >
{
typedef typename
if_then_else
<
is_equal<Head1::remaining_capacity, Head2::remaining_capacity>::result,
type_list
<
state
<
max_value<Head1::profit, Head2::profit>::result,
Head1::remaining_capacity
>,
typename merge_state_lists<Tail1, Tail2>::result
>,
typename if_then_else
<
is_less<Head2::remaining_capacity, Head1::remaining_capacity>::result,
type_list
<
Head1,
typename merge_state_lists< Tail1, type_list<Head2, Tail2> >::result
>,
type_list
<
Head2,
typename merge_state_lists< type_list<Head1, Tail1>, Tail2 >::result
>
>::result
>::result result;
};
|
La récursivité s'effectue sur deux listes,
nous allons donc devoir faire une
spécialisation pour le cas d'une liste vide
pour chacune d'elles :
\brief
template<typename StateList>
struct merge_state_lists<empty_list, StateList>
{
typedef StateList result;
};
\brief
template<typename StateList>
struct merge_state_lists<StateList, empty_list>
{
typedef StateList result;
};
|
Cependant, si nous laissons le code comme
cela, le compilateur ne saura pas quel
patron instancier lorsque les deux
listes sont vides simultanément. Nous devons
donc déclarer une troisième spécialisation
pour ce cas :
\brief
template<>
struct merge_state_lists<empty_list, empty_list>
{
typedef empty_list result;
};
|
3.3.1.3. Suppression des états inefficaces
La dernière étape du calcul de la nouvelle
liste d'états dans la programmation
dynamique est la suppression des états les
plus mauvais. Cette étape s'écrit d'une
manière similaire au patron
filter<>
présenté dans la section 3.1.2.1, à ceci
près que le seuil est mis à jour au fur et à
mesure que nous avançons dans la liste :
\brief
\param
\param
template<unsigned int Best, typename StateList>
struct clear_list;
\brief
template<unsigned int Best>
struct clear_list<Best, empty_list>
{
typedef empty_list result;
};
template<unsigned int Best, typename Head, typename Tail>
struct clear_list< Best, type_list<Head, Tail> >
{
typedef typename
if_then_else
<
is_less<Head::profit, Best>::result,
typename clear_list<Best, Tail>::result,
type_list<Head, typename clear_list<Head::profit, Tail>::result>
>::result result;
};
|
3.3.1.4.
Implémentation du patron remplaçant add_item()
Nous avons maintenant tous les éléments pour
écrire un patron de classe
add_item<>
effectuant les calculs équivalents à la
procédure
add_item().
Ce patron prend en paramètre un objet et
une liste d'états. Il définit alors la liste
des états obtenus en considérant que l'objet
est ajouté ou pas. Cette liste est
construite en supprimant les états
inefficaces dans celle résultant de la
fusion de la liste initiale avec celle
obtenue en ajoutant l'objet. En pratique,
nous écrivons cela comme suit :
\brief
\param
\param
template<typename Item, typename StateList>
struct add_item
{
typedef
typename clear_list
<
0,
typename merge_state_lists
< StateList,
typename add_item_to_all<Item, StateList>::result
>::result
>::result result;
};
|
Contrairement aux algorithmes précédents,
celui-ci n'est pas récursif. De plus, la
liste passée en paramètre devrait au moins
contenir un état. Par conséquent, nous ne
faisons pas de
spécialisation pour le cas d'une liste vide.
3.3.2. Conversion de la la procédure dp_kp()
La procédure
dp_kp()
met à jour une liste d'états en considérant les
objets un à un puis retourne le plus grand
profit dans la liste finale. Nous allons
déclarer un patron de classe pour chacune de ces
étapes.
Tout d'abord, comme pour les algorithmes
précédents, nous convertissons l'itération sur
les objets par un procédé récursif. Nous
commençons par ajouter le premier objet dans la
liste des états donnés, puis nous répétons le
processus sur la liste résultant de cet ajout et
sur les objets restants. Là encore, nous avons
besoin d'une spécialisation pour mettre un terme
à la récursivité lorsque tous les objets ont été
considérés. Au final, ce patron est déclaré
comme suit :
\brief
\param
\param
template<typename StateList, typename ItemList>
struct dp_kp_loop;
\brief
\param
template<typename StateList>
struct dp_kp_loop<StateList, empty_list>
{
typedef StateList result;
};
template<typename StateList, typename ItemHead, typename ItemTail>
struct dp_kp_loop< StateList, type_list<ItemHead, ItemTail> >
{
typedef typename
dp_kp_loop
<
typename add_item
<
ItemHead,
StateList
>::result,
ItemTail
>::result result;
};
|
Par construction, le profit du dernier état de la
liste construite par add_item<>
est maximal. Au final, nous ne retournerons donc cet
état comme solution du problème.
Nous écrivons alors le patron ci-dessous pour
récupérer le dernier type d'une liste de types :
\brief
\param
template<typename TypeList>
struct last_type;
template<typename Head, typename Tail>
struct last_type< type_list<Head, Tail> >
{
typedef typename last_type<Tail>::result result;
};
|
Bien sûr, l'utilisation de ce patron n'a de sens
que si la liste des états contient au moins un
état. Cette situation correspond à la
spécialisation permettant de mettre fin à la
récursivité :
template<typename Head>
struct last_type< type_list<Head, empty_list> >
{
typedef Head result;
};
|
Tous les éléments sont maintenant présents pour
effectuer le calcul de la valeur optimale des
solutions d'un problème de sac à dos. Il ne nous
reste plus qu'à définir un patron de classe
prenant en paramètre la capacité du sac et la
liste des objets, et qui définit comme résultat
un des états ayant le profit maximum parmi ceux
obtenus par la boucle d'ajout des objets. Ce
patron sera le suivant :
\brief
<>
\param
\param
<>
template<unsigned int Capacity, typename ItemList>
struct dp_kp
{
typedef typename
last_type
<
typename dp_kp_loop
<
type_list<state<0, Capacity>, empty_list>,
ItemList
>::result
>::result result;
};
|
Le code ci-dessous illustre l'utilisation du patron
dp_kp<>
pour calculer la valeur du problème présenté dans la
section 1.1. Pour plus de lisibilité, les poids et
la capacité du sac ont été divisés par 100 000 :
int main()
{
typedef
type_list< item<4, 40>,
type_list< item<4, 52>,
type_list< item<2, 27>,
type_list< item<5, 68>,
type_list< item<5, 80>,
type_list< item<3, 62>,
type_list< item<3, 63>,
type_list< item<2, 53>,
type_list< item<1, 56>,
type_list< item<1, 59>,
empty_list
>
>
>
>
>
>
>
>
>
>
kp;
std::cout
<<"profit optimal : "
<< dp_kp<160, kp>::result::profit
<<" pour une capacite de : "
<< dp_kp<160, kp>::result::remaining_capacity
<<"\n";
return 0;
}
|
4. Expérimentations numériques
Nous avons implémenté quatre algorithmes pour résoudre
des problèmes de sac à dos : une procédure récursive
avec un équivalent en méta-programmation et l'algorithme
de programmation dynamique, aussi avec un équivalent en
méta-programmation. Pour évaluer les performances de ces
quatre approches, nous allons les appliquer à un
ensemble d'instances du problème initial.
Bien sûr, le temps d'exécution des versions utilisant la
méta-programmation seront constants, étant donné que le
calcul est effectué durant la compilation. Par
conséquent, nous mesurerons le temps de compilation pour
ces versions. Ainsi, nous pourrons situer les
performances du compilateur.
Les instances ont une taille variant de 5 à 15, puis de
15 à 50 par pas de 5. Les profits et les poids sont
générés aléatoirement dans l'intervalle [1 ; 1 000] et
la capacité du sac est dans tous les cas égale à la
moitié de la somme des poids des objets. Enfin, 10
instances ont été générées pour chaque taille.
L'ordinateur sur lequel les évaluations sont effectuées
est doté d'un processeur Intel Pentium M cadencé à
2 GHz, ainsi que de 1,5 Gio de mémoire. Le compilateur
g++ est utilisé, dans sa version 4.3.
Les temps de compilation et d'exécution moyens, maximaux
et minimaux parmi les dix instances d'une taille donnée
sont présentés par la courbe ci-dessous. La
programmation dynamique par liste ayant résolu chacune
des instances en moins d'un dixième de seconde, les
temps ne sont pas reportés dans ce graphique :
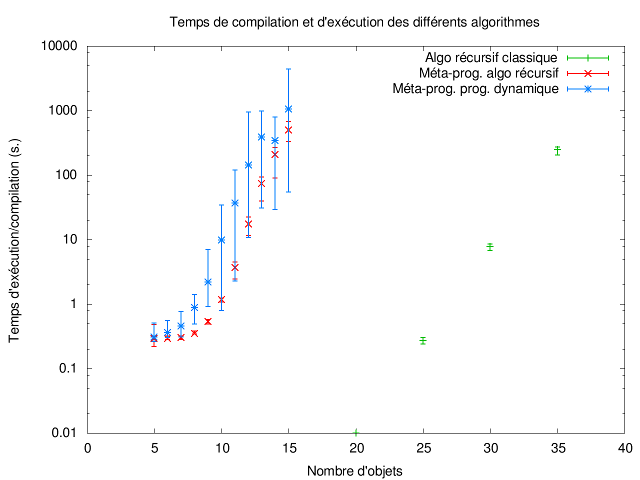
Sans surprise, les temps de compilation des versions
méta-programmation des algorithmes sont bien plus grands
que ceux des algorithmes compilés. Cependant, il est
étonnant de constater que pour les versions
meta-programmation l'algorithme récursif est bien plus
rapide que la programmation dynamique. Cela s'explique
en deux points. Tout d'abord, la programmation dynamique
produit de nombreuses instanciations des patrons de classes,
ce qui est coûteux à maintenir pour le compilateur.
D'autre part, avec l'algorithme récursif en
méta-programmation le compilateur ne résout pas deux fois
le même problème, comme en programmation classique. Quand
il a résolu le type solve_kp<W, L>
une fois pour une capacité W donnée et une liste L d'objets,
il réutilisera cette solution à chaque fois que ce même type
réapparaîtra dans l'exploration. En fait, le compilateur fait
implicitement ce que l'on demande à la programmation dynamique.
En particulier, nous avons observé de grandes variations des
temps de résolution avec la programmation dynamique en
méta-programmation en fonction du nombre de patrons utilisés.
5. Conclusion
Dans cet article, nous avons proposé deux
méta-programmes permettant de résoudre des problèmes de
sac à dos durant la compilation du programme. Nous avons
tout d'abord présenté le problème, puis deux algorithmes
permettant de calculer la valeur optimale des solutions
de ses instances. Nous avons ensuite présenté des
techniques de méta-programmation utilisant des patrons
de classes et nous avons implémenté les deux algorithmes
initiaux en utilisant ces techniques.
Nous avons ensuite évalué les performances des
algorithmes sur plusieurs instances du problème.
Il ressort que l'approche de la programmation dynamique est
la moins performante dans le cas de la
méta-programmation, alors qu'elle surpasse l'approche
récursive dans leurs versions compilées.
Les algorithmes implémentés ne calculent que la valeur
optimale des solutions, sans indiquer quels objets sont
effectivement choisis ou non. Il pourrait être
intéressant d'étendre les structures pour prendre en
compte cette information.
Enfin, il serait intéressant de produire une
implémentation de la programmation dynamique utilisant
moins de patrons de classe, afin d'évaluer l'influence
de ce paramètre sur le temps de compilation. Une
évaluation de ce temps avec d'autres
compilateurs serait aussi la bienvenue.
L'archive
meta-kp.tar.gz
contient les programmes présentés dans cet article,
ainsi que les instances de test.
6. Références
-
R. E. Bellman.
Dynamic Programming.
Princeton University Press, 1957.
-
S. Martello et P. Toth.
Knapsack Problems : Algorithms and Computer
Implementations
.
John Wiley & sons, 1990.
(pdf).



Copyright 2010 Julien Jorge. Cet article est mis à disposition
sous les termes de la licence
Creative Commons
paternité, partage à l'identique, dans sa version 3.0.